
:quality(80)/p7i.vogel.de/wcms/f9/e6/f9e6d7178831f3a939f6cb722e21007f/0132594477v1.jpeg "Redundanz kann ein Sicherheitsgefühl vermitteln, während ungeprüfte Infrastruktur und Notfallprozesse sowie physische und digitale Angriffsrisiken diesen Schein signifikant bedrohen. (Bild: Daniel Schrader / GPT-Image 2 / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/20/a1/20a1347bae821ee294285a2408de3cdb/0132508336v1.jpeg "Der Betreiber setzt bei Rechenzentren auf Ökostrom und Daten in Deutschland. (Bild: Pfalzkom)")
:quality(80)/p7i.vogel.de/wcms/06/50/06506387ede0e72e8d404494a3b9f2b1/0132511022v1.jpeg "KI-Infrastruktur und Rechenzentrumssystems treiben laut Gartner das weltweite IT-Ausgabenwachstum 2026 maßgeblich an. (Bild: © jamesteohart - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/8b/ae/8baee103debba73f2362593fc17d79fc/0132543354v1.jpeg "PUE zeigt Effizienz. Intelligente Laststeuerung entscheidet darüber, wie viel Rechenleistung ein Standort aus seiner verfügbaren Energie- und Netzkapazität herausholt, so Torge Lahrsen. (Bild: Daniel Schrader / GPT Image 2 / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/44/3a/443a4cb166a005757c21dd48a5ae8a26/0132505426v1.jpeg "CPU, GPU, Netzwerk und Software stammen aus dem AMD-Portfolio. Gemeinsam mit Supermicro entsteht eine durchgängige Infrastruktur für KI-Training und Inferenz. (Bild: Gemini / Paula Breukel / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/e8/d4/e8d462ed9972be2b8464c790cce263c0/0132429621v1.jpeg "Die Integration der KI-gestützten Designexploration von Precision Innovations soll die Silizium-Chip-Entwicklung beschleunigen, so Siemens. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/37/0a/370aa88021e97f80526e1d07f8a64ca9/0132435873v1.jpeg "Die „ND MI455X v7“-Serie basiert auf AMDs Rackscale-Design und soll Reasoning- und Suchanwendungen sowie KI-Agenten in Azure beschleunigen. (Bild: Midjourney / Paula Breukel / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/0b/0e/0b0ef1fc1c379ab914c58f63a1ea58be/0132441193v1.jpeg "Storage-Schichten, geo-verteilte Datenhaltung und offene Standards sind die Grundlage für resiliente und souveräne Infrastrukturen. (Bild: Midjourney / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/67/c3/67c399c0d42006c206b19ca13a408732/0132302716v1.jpeg "AI Restacking integriert Künstliche Intelligenz in alle Ebenen der Unternehmensarchitektur. Geschäftsprozesse, Daten, Anwendungen und Technologien bilden dabei ein vernetztes System, das kontinuierlich aus Daten und Feedback lernt. (Bild: © BalanceFormCreative - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/73/8d/738d892859c9bf552bffeaee476c1bc3/0132416407v1.jpeg "Die Architektur soll KI-Inferenz, Container und virtuelle Maschinen an dezentralen Standorten sichern. (Bild: © Starmarpro - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/bb/84/bb848b79900a103b8aaed3207f1f1055/0132159005v1.jpeg "KI verändert die Wirtschaftlichkeit von Cloud-Infrastrukturen grundlegend. Wer Ressourcen weiterhin statisch bereitstellt, zahlt oft deutlich mehr als technisch erforderlich wäre. (Bild: © Zamrznuti tonovi - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/be/a9/bea9813088d28bae7b19799a194fe99c/0131951229v1.jpeg "Ewe hat seine Java-Umgebung über mehr als 100 Anwendungen und Zehntausende Desktop-Arbeitsplätze standardisiert. Nach Angaben des Unternehmens sanken dadurch die Java-Lizenzkosten um 60 Prozent. (Bild: © RomanR - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/1c/2e/1c2e0effc700eddefcf2264786aef800/0131879187v1.jpeg "Siemens erweitert sein Portfolio für industrielle KI bei der Verarbeitung von Produktionsdaten und bei der Automatisierung von Engineering-Prozessen. (Bild: Midjourney / Paula Breukel / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/95/a7/95a74d5f20e7e05ab33efde3fdfb1008/0132474712v3.jpeg "Auf der \"ISC High Performance 2026\" präsentierten zahlreiche Hersteller neue Quantencomputer sowie Software und Integrationslösungen für hybride HPC-Umgebungen. (Bild: Alice&Bob)")
:quality(80)/p7i.vogel.de/wcms/63/38/63389b116419fdfba92da2a91ad4c4d2/0132481063v1.jpeg "Fehlende Rechenkapazitäten, geringe Investitionen und internationale Abhängigkeiten bremsen den Aufbau einer europäischen Quantenindustrie. (Bild: Midjourney / Paula Breukel / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/99/2b/992bf8039e0c0a2818d7c01508cc2fd5/0132147095v1.jpeg "Stephan Reitzenstein vor der Probenkammer der Elektronenstrahl-Lithographie-Anlage: Diese Anlage stellt die hochpräzise Nanostrukturen für skalierbare Quantenlichtquellen her. (Bild: Felix Noak)")
:quality(80)/p7i.vogel.de/wcms/d0/75/d075ceeb4de4543fd6446dd4b26825d2/0131796600v2.jpeg "Am 21. Mai 2026 hat Globa lFoundries den Geschäftszweig „Quantum Technology Solutions“ ins Leben gerufen, der zur Skalierung der Fertigungskapazitäten gedacht ist. Der Geschäftsbereich startet mit Kundenverträgen und einer Pipeline von Quanteninnovatoren, die darauf ausgerichtet sind, auf seiner Plattform zu skalieren, so Silicon Saxony. (Bild: frei lizenziert: Gerhard Altmann)")
:quality(80)/p7i.vogel.de/wcms/a9/a3/a9a38515d76d5d2bdbf552020689dd4c/0132133445v1.jpeg "Veraltete IT-Strukturen, steigende Sicherheitsanforderungen und moderne Workloads: Alles Gründe dafür, die Infrastruktur schrittweise zu modernisieren. Aber wie soll das gelingen, ohne den laufenden Betrieb zu gefährden? (Bild: © Chainarong - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/01/1e/011eecedd1890f96971d8c6334e59403/0131873319v2.jpeg "Das Bild visualisiert einen Zufallszahlengenerator, der auf Quantenfluktuationen beruht (Bild: Fraunhofer IPMS/KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/29/33/2933cd5e834f8070b6c6777334e0aa0e/0131690146v1.jpeg "Wie Unternehmen mit ausgealterten Daten und IT-Hardware ümgehen, ist auch und nicht zuletzt eine Frage der Sicherheit. (Bild: © VladaToday - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ab/65/ab65db7e99df89b1b486f75c13496180/0132419758v1.jpeg "Rechenzentrum ist nicht gleich Cloud. Über die Unterschiede zwischen Colocation und Cloud-Diensten und weshalb der Zugriff auf Daten wichtiger ist als der Standort der Infrastruktur. (Bild: Midjourney / Paula Breukel / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/de/01/de011e022cf7a4457aa686dfe2f20755/0132592633v1.jpeg "Blick auf's Kraftwerk Staudinger 2019: Hier plant Uniper die Entwicklung eines Rechenzentrumscampus mit Energieinfrastruktur. (Bild: Kraftwerk Staudinger - power plant Staudinger / Alban.py / CC BY-SA 2.0 / flickr.com)")
:quality(80)/p7i.vogel.de/wcms/47/67/47674acc2bfaf7b633e6a27e5796a056/0132591049v1.jpeg "Das Rechenzentrum in Ohio entsteht nicht im Eigentum von OpenAI. Der Konzern übernimmt vor allem die Rolle des langfristigen Mieters und Koordinators. (Bild: Midjourney / Paula Breukel / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/dd/3e/dd3e2627864aea6931a85a604ecb9048/0132529570v1.jpeg "Gießen von oben: Im Industriegebiet „Katzenfeld“ soll ein Rechenzentrum entstehen. Was bislang bekannt ist. (Bild: THM Gießen / atxcowboy / CC BY-SA 2.0 / flickr.com)")
:quality(80)/p7i.vogel.de/wcms/48/fa/48fae955ace458bfeb45fb69c5f1cf83/0132525775v1.jpeg "Helmut Kohl spricht sich für einen stärker dezentralen Ausbau der Rechenzentrumslandschaft aus. (Bild: Midjourney / Paula Breukel / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f3/da/f3dacd38e5834ae3f3c9d0a4bc9664d3/0113348475.jpeg "Das vom Umweltbundesamt beauftragte Projekt „Public Energy Efficiency Register of Data Centres “ (PeerDC), ist nach Einschätzung der Beteiligten Marina Köhn (UBA), Peter Radgen (IER Uni Stuttgart) und Felix Behrens (Öko-Institut e.V.) ein Erfolg auf ganzer Linie. Das sah DataCenter-Chefredakteurin Ulrike Ostler nach dem DataCenter-Diaries Podcast #16 nicht ganz so rosa. (Bild: sdecoret - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/90/f5/90f56ec6cb3ddbdabca2162fd5477836/0113078524.jpeg "(Bild: Vogel IT-Medien GmbH)")
:quality(80)/p7i.vogel.de/wcms/0f/09/0f097990002b7600075e43c92af4a3fd/0110524571.jpeg "(Bild: frei lizenziert/Krystsina Radzewich)")
:quality(80)/p7i.vogel.de/wcms/66/ae/66ae9e32738784b57e2ad8c1a4b0986f/0109756744.jpeg "Eines der in Deutschland befindlichen NTT-Datacenter - in Hattersheim - und das PeerDC-Logo. (Bild: NTT Global Data Centers )")
:quality(80)/p7i.vogel.de/wcms/b6/2f/b62f5450fa983d6fba21ec3b64a51be3/0132542976v1.jpeg "Wenn man neben dem täglichen Betrieb die Lieferketten von Komponenten und die Bauaktivitäten misst, erscheint der Emissionsbeitrag von Rechenzentren in einem ganz anderen Licht, so Alliance Research. (Bild: Daniel Schrader / GPT Image 2 / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ee/3f/ee3f063b82737f0369c09ba7854587b5/0127234708v1.jpeg "Das sind die Gewinner der IT-Awards 2025! (Bild: Vogel IT-Medien)")
:quality(80)/p7i.vogel.de/wcms/f1/f0/f1f007a4518fa65d3cb0ea5ca465142a/0121300054v3.jpeg "Strahlende Gesichter bei allen, die die Preise des 10. DataCenter-Insider Award am gestrigen 17. Oktober abholen durften - in den Kategorien: Schnelles Interconnect, Infrastruktur der Resilienz, Coole Kühlung, HPC- und KI-Hardware, Grünes Co-Location und Cloud-native Plattformen. (Bild: Manuel Emme Fotografie)")
:quality(80)/p7i.vogel.de/wcms/a8/28/a828f76369267628d833a12c26dd6579/0121131534v3.jpeg "DataCenter-Insider verleiht heute die IT-Awards 2024 in sechs Kategorien. (Bild: Vogel IT-Medien)")
Atos hier, Google da - Supercomputer hier - ML überall Supercomputing und Machine Learning für präzise Wetterprognosen
Wetter ist wichtig - für den Katastrophenschutz, für Heuschnupfengeplagte, für die Landwirtschaft, für Grillfestplaner …. -, doch zu ungenau, bezogen auf die Zeitfenster und geografische Raster. Um bessere Vorhersagen treffen zu können, braucht es leistungsfähigere Computer und Künstliche Intelligenz. So will Google künftig „nowcasten“ und Atos liefert einen AMD-bestückten Supercomputer an das Europäische Zentrum für mittelfristige Wettervorhersagen.
Anbieter zum Thema
:fill(fff,0)/p7i.vogel.de/companies/64/e4/64e4be0db6ddc/rittal-4c-w.png "rittal-4c-w (Rittal GmbH & Co. KG)")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/125000/125044/65.jpg "Rosenberger.jpg ()")
In einem Paper* stellt Jason Hickey, Senior Software Engineer bei Google Research, das Prinzip des „nowcasten“ vor. Im Prinzip soll KI-Software einfache Radardaten verwenden, um das Wetter mit bemerkenswerter Kurzzeitgenauigkeit vorherzusagen.
„In dem Bericht ´Machine Learning for Precipitation Nowcasting from Radar Images´ stellen wir neue Forschungsarbeiten zur Entwicklung von Modellen für die Niederschlagsvorhersage vor, die diese Herausforderung annehmen, indem sie hochgradig lokalisierte, ´physikfreie´ Vorhersagen für die unmittelbare Zukunft machen.“, schreibt er. Ein wesentlicher Vorteil des maschinellen Lernens sei, dass die Inferenz rechnerisch günstig ist, wenn ein bereits trainiertes Modell verwendet werde, das Vorhersagen ermögliche, die nahezu augenblicklich und in der nativen hohen Auflösung der Eingabedaten erfolgten.
Es handle sich um ein „Niederschlags-Nowcasting“, das sich auf Vorhersagen von bis zu sechs Stunden konzentriere. Die Vorhersagen seinen mit einer Auflösung von einem Kilometer und einer Gesamtlatenzzeit von nur fünf bis zehn Minuten möglich. Darin eingeschlossen sein zudem bereits die Verzögerungen bei der Datenerfassung, die selbst in diesen frühen Entwicklungsphasen die traditionellen Modelle überträfen.

Die Voraussetzungen: Wetteragenturen auf der ganzen Welt verfügten bereits über umfangreiche Überwachungseinrichtungen. Zum Beispiel mäße das Doppler-Radar den Niederschlag in Echtzeit, Wettersatelliten lieferten multispektrale Bilder, Bodenstationen erfassten Wind und Niederschlag direkt.
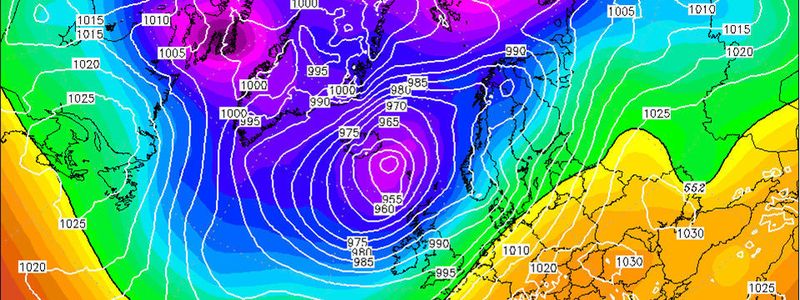
Die Abbildungen, die Falschfarben-Radarbildgebung des Niederschlags über dem US-Kontinent mit der von geosynchronen Satelliten aufgenommenen Wolkendecke vergleicht, veranschauliche den Bedarf an Wetterinformationen aus mehreren Quellen: Die Existenz von Regen ist mit der Existenz von Wolken verbunden, aber nicht perfekt korreliert, so dass es schwierig ist, Niederschlag allein aus Satellitenbildern abzuleiten.
Außerdem seien nicht alle diese Messungen sind auf dem gesamten Globus gleich verteilt. So stammen die Radardaten zum großen Teil von Bodenstationen und für Ozeane in der Regel nicht verfügbar. Außerdem variiere die geografische Abdeckung geografisch. Dennoch gibt es so viele Beobachtungsdaten in so vielen verschiedenen Varianten, dass es für die Vorhersagesysteme schwierig ist, alle Daten zu berücksichtigen.
Unmengen an Daten, fehleranfällig und mit Zeitverzug
In den USA erreichten die von der National Oceanic and Atmospheric Administration (NOAA) gesammelten Fernerkundungsdaten inzwischen 100 Terabyte pro Tag. Die NOAA nutzt diese Daten, um die massiven Wettervorhersage-Engines zu speisen, die auf Supercomputern laufen, um globale Vorhersagen für ein bis zehn Tage zu liefern.
Diese Engines seien im Laufe des vergangenen halben Jahrhunderts entwickelt worden und basierten auf numerischen Methoden, die physikalische Prozesse direkt simulierten, einschließlich der atmosphärischen Dynamik und zahlreicher Effekte wie Wärmestrahlung, Vegetation, See- und Ozean-Effekte. Zudem schränke die begrenzte Verfügbarkeit von Berechnungsressourcen die Leistungsfähigkeit der numerischen Wettervorhersage in mehrfacher Hinsicht ein.
Das bezieht sich zum Beispiel auf die räumliche Auflösung, derzeit etwa fünf Kilometer. Das aber reiche was für die Auflösung von Wettermustern innerhalb von städtischen Gebieten und landwirtschaftlichen Flächen nicht aus. Außerdem benötigen numerische Methoden mehrere Stunden für ihre Ausführung. Wenn es sechs Stunden dauere, um eine Vorhersage zu berechnen, dann erlaube das auch nur drei bis vier Durchläufe pro Tag und führt zu Vorhersagen, die auf 6+ Stunden alten Daten basierten. Aktualität sieht anders aus.
Radar-zu-Radar-Vorhersage
Als typisches Beispiel für die Art von Vorhersagen, die unser System erstellen kann, betrachtet Hickey das Problem der Radar-zu-Radar-Vorhersage: Aus einer Sequenz von Radarbildern der vergangenen Stunde lässt sich vorhersagen, wie das Radarbild in n Stunden aussehen wird, wobei n typischerweise zwischen null und sechs Stunden liege. „Da die Radardaten in Bildern organisiert sind, können wir diese Vorhersage als ein Problem der Bilderkennung darstellen, indem wir die meteorologische Entwicklung aus der Sequenz der Eingangsbilder ableiten“, so der Forscher.
Er führt aus: „ Auf diesen kurzen Zeitskalen wird die Entwicklung von zwei physikalischen Prozessen dominiert: Advektion für die Wolkenbewegung und Konvektion für die Wolkenbildung, die beide signifikant durch das lokale Gelände und die Geographie beeinflusst werden.“
: Die ersten drei Tafeln zeigen Radarbilder von 60 Minuten, 30 Minuten und 0 Minuten vor dem heutigen Zeitpunkt, dem Punkt, an dem eine Vorhersage gewünscht wird. Die rechte Tafel zeigt das Radarbild 60 Minuten nach jetzt, d.h. die Ground Truth für eine Nowcasting-Vorhersage. Unten links: Zum Vergleich ein Vektorfeld, das durch die Anwendung eines Optical-Flow (OF)-Algorithmus zur Modellierung der Advektion auf die Daten der ersten drei Panels oben induziert wurde. Optical Flow ist eine in den 1940er Jahren entwickelte Computer-Vision-Methode, die häufig zur Vorhersage der kurzfristigen Wetterentwicklung verwendet wird. Unten rechts: Eine Beispielvorhersage, die von OF gemacht wurde. Beachten Sie, dass sie die Bewegung des Niederschlags in der linken unteren Ecke gut verfolgt, aber die abnehmende Stärke des Sturms nicht berücksichtigt.")
Wenn Hickey von einem „physikfreien“ Ansatz spricht, meint er, dass das neuronale Netz allein aus den Trainingsbeispielen lernt, die Atmosphärenphysik zu approximieren, und nicht, indem es a priori Wissen darüber einbezieht, wie die Atmosphäre tatsächlich funktioniert. „Wir behandeln die Wettervorhersage als ein Bild zu Bild-Interpretationsproblem und nutzen convolutional neural networks (CNNs) für die Bildanalyse“
CNNs bestehen in der Regel aus einer linearen Abfolge von Schichten, wobei jede Schicht aus einer Reihe von Operationen besteht, die ein Eingangsbild in ein neues Ausgangsbild transformieren. Oftmals verändert eine Ebene die Anzahl der Kanäle und die Gesamtauflösung des Bildes und „faltet“ das Bild zusätzlich mit einem Satz von Filtern. Diese Filter sind selbst kleine Bilder, „für uns sind sie typischerweise nur 3x3, oder 5x5“. Das Ganze führt zu Operationen wie Kantenerkennung und Identifizierung von sinnvollen Mustern.
Eine besonders effektive Art von CNN sei das U-Netz, führt Hickey aus. U-Netze haben eine Abfolge von Schichten, die in einer Kodierungsphase angelegt werden, in der schrittweise die Auflösung Bilder verringert wird; es folgt eine Dekodierungsphase, in der die reduzierten Darstellungen wieder in höheren Auflösungen überführt werden.

Die Eingabe in das U-Netz entspricht das einem Bild, das für jedes multispektrale Satellitenbild in der Reihenfolge der Beobachtungen der vergangenen Stunde einen Kanal enthält. Sind beispielsweise zehn Satellitenbilder gesammelt worden und wurde jedes dieser multispektralen Bilder bei zehn verschiedenen Wellenlängen aufgenommen, dann wäre die Bildeingabe in ein Modell ein Bild mit 100 Kanälen. Für die Radar-zu-Radar-Vorhersage werden 30 Radarbeobachtungen in der einer Stunde im Abstand von zwei Minuten eingegeben.
„Für unsere ersten Arbeiten in den USA haben wir ein Netzwerk aus historischen Beobachtungen über den Kontinent aus dem Zeitraum zwischen 2017 und 2019 trainiert“, erläutert Hickey. Die Daten seien in Perioden von vier Wochen aufgeteilt, wobei die ersten drei Wochen jeder Periode für das Training und die vierte Woche für die Auswertung verwendet wurden.
Um die Ergebnisse zu verifizieren, vergleichen die Google-Forscher ihre mit drei weit verbreiteten Modellen.
- 1. mit der numerischen Vorhersage des High Resolution Rapid Refresh (HRRR) der NOAA. „Wir haben unsere Ergebnisse mit ihrer Ein-Stunden Vorhersage des gesamten kumulierten Oberflächenniederschlags verglichen, da dies ihre qualitativ hochwertigste Ein-Stunden Vorhersage des Niederschlags war“, so Hickey.
- 2. mit einem ein „optical flow“-Algorithmus, der versucht, bewegte Objekte durch eine Bildsequenz zu verfolgen. Dieser Ansatz wird oft für Wettervorhersagen verwandt, obwohl dabei vorausgesetzt wird, dass die Gesamtregenmengen über große Gebiete über die Vorhersagezeit konstant bleibt.
- 3. mit einem Persistenzmodell – dieses ist laut Hickey vergleichsweise trivial, das angenommen wird, das sich das Niederschlagsmuster sich nicht ändert.
In seinen vorgelegten Präzisions- und Recall (PR)-Grafiken übertrifft die Qualität der Prognosen des des Neuronalen Netzes von Google alle drei Modelle. Doch laut Hickey beginnt das HRRR-Modell, die aktuellen Google-Ergebnisse zu übertreffen, wenn der Vorhersagehorizont bei etwa fünf bis sechs Stunden liegt.
Allerdings hält er noch einmal fest, dass einer der Vorteile der ML-Methode ist, dass die Vorhersagen fast augenblicklich da seien, dass damit die Vorhersagen auf frischen Daten basieren, während die HRRR durch eine rechnerische Latenzzeit von ein bis drei Stunden behindert werde. Er kündigt an: „Wir wollen ML auch direkt auf 3D-Beobachtungen anwenden.“
ECMWF kauft Supercomputer von Atos
Derweil haben Atos und das Europäische Zentrum für mittelfristige Wettervorhersagen (ECMWF – European Centre for Medium-Range Weather Forecasts) haben einen Vertrag mit einer Laufzeit von vier Jahren und einem Wert von mehr als 80 Millionen Euro geschlossen. Das Abkommen umfasst die Lieferung des Supercomputers „Bull Sequana XH2000“.
Er werde die Rechenleistung des ECMWF um etwa das Fünffache steigern und Hunderte von Forschern aus über 30 Ländern in ganz Europa bei ihren Arbeiten zur mittel- und langfristigen Wettervorhersage unterstützen. Der Supercomputer wird mit „Epyc-7742“-Prozessoren von AMD sowie mit Technik von Mellanox und DDN ausgestattet.
Das ECMWF mit Sitz im britischen Reading ist eine unabhängige internationale Organisation, unterstützt von 34 Mitglieds- und Kooperationsstaaten in ganz Europa, und verfügt über das weltweit größte Archiv an numerischen Wettervorhersagedaten. Das neue System wird 2020 im ECMWF-Rechenzentrum im italienischen Bologna bereitgestellt und installiert und geht 2021 in Betrieb. Für System-Verwaltung, -Betrieb und -Wartung arbeitet Atos vor Ort mit dem Unternehmen E4 Computer Engineering zusammen.
2021 geht es los
Sobald der Supercomputer in Betrieb ist, wird das ECMWF seine 15-tägige weltweite Ensemble-Vorhersage, mit einer Auflösung von etwa zehn Kilometern ausführen können. Dr. Florence Rabier, Director General des ECMWF, sagt: „Dank dieser Investition können wir Prognosen mit höherer Auflösung in weniger als einer Stunde erstellen. Das bedeutet, dass unsere Mitgliedsstaaten schneller bessere Informationen erhalten und wesentlich genauere Prognosen treffen können, weil sie diese Informationen mit ihren eigenen Daten und Vorhersagen kombinieren. Angesichts der Auswirkungen der immer heftigeren Unwetter, die Regierungen und Gesellschaft zu bewältigen haben, sind wir auch stolz darauf, dass unser Supercomputer auf maximale Energie-Effizienz ausgelegt ist.“
Das ECMWF ist nicht der einzige Supercomputing-Kunde von Atos, der sich mit Wettervorhersagen, Erdsysteme und Klimamodellierung beschäftigt. Dazu gehört der französische Wetterdienst Meteo France, das Deutsche Klimarechenzentrum (DKRZ), die spanische Wetterbehörde AEMet, das Königlich Niederländische Meteorologische Institut (KNMI) sowie das Plymouth Marine Laboratory. Darüber hinaus ist Atos auch ein Partner nationaler Wetterzentren in den europäischen Projekten ESCAPE2 und ESIWACE2. Diese entwickeln Wettermodelle, die einen Beitrag für die künftige Atmosphärenforschung leisten sollen.
*An der Google-Forschung beteiligt waren Carla Bromberg, Shreya Agrawal, Cenk Gazen, John Burge, Luke Barrington, Aaron Bell, Anand Babu, Stephan Hoyer, Lak Lakshmanan, Brian Williams, Casper Sønderby, Nal Kalchbrenner, Avital Oliver, Tim Salimans, Mostafa Dehghani, Jonathan Heek, Lasse Espeholt, Sella Nevo und Avinatan Hassidim.
(ID:46315694)
:quality(80)/p7i.vogel.de/wcms/7f/39/7f3904c8e34848303d65dcb8fa84bef0/0126326548v1.jpeg "Im Bild: Die Kühlanlagen auf dem Dach des „Modular Data Centre“, in dem „Jupiter“untergebracht ist. Mit mehr als 60 Milliarden Rechenoperationen pro Watt ist Jupiter der effizienteste unter den fünf leistungsfähigsten Superrechnern der Welt. (Bild: Forschungszentrum Jülich/Sascha Kreklau)")
:quality(80)/p7i.vogel.de/wcms/c2/62/c262b34c46d646db2ddce3a018e41dce/0130051138v2.jpeg "Das Bild soll einen futuristiscen Silicon-Photonics-Chip darstellen. (Bild: © Sawat - stock.adobe.com / KI-generiert)")